📌 TOPINDIATOURS Hot ai: Voltage pulses allow hair-thin carbon fibers to move like
In laboratories around the world, scientists have long dreamed of building machines so small that they could grip, bend, and move objects thinner than a strand of hair. However, controlling something so tiny precisely and reversibly has been a big challenge.
Now, a team of researchers from the Polish Academy of Sciences has shown that even a bare carbon fiber, no thicker than a human hair, can bend and straighten on command, without any direct wiring.
Their proof-of-concept study reveals a new way to turn ordinary carbon fibers into miniature actuators. This achievement could reshape micromechanics and soft robotics by offering a simpler route to motion at the microscopic scale.
“We anticipate that these results will enrich the tool case for research in the field of soft robotics and micromechanics,” the study authors note.
The long-standing challenge of smart fibers
For years, researchers have tried to make smart fibers—materials that change shape when exposed to electricity, light, heat, or changes in acidity. Smart polymers already exist and can respond to such stimuli, altering their color or shape and then returning to their original state.
However, when it comes to microfibers and nanofibers, things become harder. Many systems require special coatings, structural modifications, or complex fabrication steps to make the fibers responsive. This adds cost, complexity, and limits real-world use.
The core problem has been precise and reversible control. Scientists could sometimes make a fiber move, but not in a controlled and repeatable way. That is where the study authors took a different approach.
Instead of heavily modifying the fibers, they used uncoated and unaltered carbon fibers and focused on how electricity interacts with them.
Carbon fibers are already valued in engineering. They are lighter than steel or aluminum but extremely strong. They also conduct electricity, which makes them ideal for electrochemical experiments.
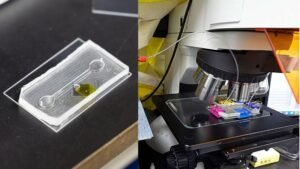
The researchers placed a single microdiameter carbon fiber inside a special electrochemical setup called a bipolar cell. This type of system has been used since the 1970s in biosensors, reactors, and batteries. Here’s how their setup worked in simple terms:
Electricity made a carbon fiber bend
The fiber was placed between two compartments filled with a liquid containing ions—charged particles such as lithium (Li⁺) and perchlorate (ClO₄⁻). The solution also contained a redox pair: benzoquinone and hydroquinone, which help drive oxidation and reduction reactions.
When an external voltage was applied across the cell, something remarkable happened. The team compared two kinds of fibers: smooth ones and naturally rough ones. The rough fibers had tiny grooves and uneven pores on their surfaces. In these rough fibers, the distribution of pores was not symmetrical. That natural asymmetry turned out to be crucial.
When voltage was applied, ions from the liquid entered the fiber surface unevenly. On one side of the fiber, oxidation occurred; on the other, reduction. As ion insertion was stronger on one side than the other, the fiber experienced uneven tension.
This caused it to bend. When the voltage was reversed or removed, the ions left the fiber surface. The tension disappeared, and the fiber straightened again. In short, ions moving in and out of the carbon fiber caused it to bend and unbend.
The motion was fully reversible and depended on the applied voltage and the fiber’s length.
Importantly, the fiber was not directly connected to a wire. The closed bipolar cell allowed simultaneous oxidation at one end and reduction at the other, enabling wireless actuation.
“We successfully used the closed bipolar cell to wirelessly actuate a freestanding carbon fiber electrochemically,” Wojciech Nogala, one of the study authors, said.
The researchers also showed that voltage pulses could be applied in cycles. By carefully controlling the pulse duration and voltage level, the fiber could move up and down repeatedly—like microscopic tweezers. This demonstrates that the system is not just a one-time effect but a controllable mechanical response.
A promising proof of concept
This study is still at the proof-of-concept stage, but its implications are wide. If simple, prefabricated asymmetric carbon fibers can act as tiny actuators, engineers may not need complicated coatings or redesigns to build micro-scale devices.
Such fibers could be used in synthetic muscles for microrobots, in microelectromechanical systems, or in devices that need to move or grip objects at extremely small scales. The motion strength depends on voltage and fiber length, which means the system can be tuned.
Going forward, the team plans to explore actuators based on prefabricated asymmetric carbon fibers and to optimize performance.
If successful, this simple mechanism, driven by ions flowing in and out, could help power the next generation of soft robotic systems and microscopic tools, bringing us closer to machines that operate at the scale of cells and tiny structures.
The study is published in the journal Nature Communications.
🔗 Sumber: interestingengineering.com
📌 TOPINDIATOURS Breaking ai: ByteDance Introduces Astra: A Dual-Model Architecture
The increasing integration of robots across various sectors, from industrial manufacturing to daily life, highlights a growing need for advanced navigation systems. However, contemporary robot navigation systems face significant challenges in diverse and complex indoor environments, exposing the limitations of traditional approaches. Addressing the fundamental questions of “Where am I?”, “Where am I going?”, and “How do I get there?”, ByteDance has developed Astra, an innovative dual-model architecture designed to overcome these traditional navigation bottlenecks and enable general-purpose mobile robots.
Traditional navigation systems typically consist of multiple, smaller, and often rule-based modules to handle the core challenges of target localization, self-localization, and path planning. Target localization involves understanding natural language or image cues to pinpoint a destination on a map. Self-localization requires a robot to determine its precise position within a map, especially challenging in repetitive environments like warehouses where traditional methods often rely on artificial landmarks (e.g., QR codes). Path planning further divides into global planning for rough route generation and local planning for real-time obstacle avoidance and reaching intermediate waypoints.
While foundation models have shown promise in integrating smaller models to tackle broader tasks, the optimal number of models and their effective integration for comprehensive navigation remained an open question.
ByteDance’s Astra, detailed in their paper “Astra: Toward General-Purpose Mobile Robots via Hierarchical Multimodal Learning” (website: https://astra-mobility.github.io/), addresses these limitations. Following the System 1/System 2 paradigm, Astra features two primary sub-models: Astra-Global and Astra-Local. Astra-Global handles low-frequency tasks like target and self-localization, while Astra-Local manages high-frequency tasks such as local path planning and odometry estimation. This architecture promises to revolutionize how robots navigate complex indoor spaces.
Astra-Global: The Intelligent Brain for Global Localization
Astra-Global serves as the intelligent core of the Astra architecture, responsible for critical low-frequency tasks: self-localization and target localization. It functions as a Multimodal Large Language Model (MLLM), adept at processing both visual and linguistic inputs to achieve precise global positioning within a map. Its strength lies in utilizing a hybrid topological-semantic graph as contextual input, allowing the model to accurately locate positions based on query images or text prompts.
The construction of this robust localization system begins with offline mapping. The research team developed an offline method to build a hybrid topological-semantic graph G=(V,E,L):
- V (Nodes): Keyframes, obtained by temporal downsampling of input video and SfM-estimated 6-Degrees-of-Freedom (DoF) camera poses, act as nodes encoding camera poses and landmark references.
- E (Edges): Undirected edges establish connectivity based on relative node poses, crucial for global path planning.
- L (Landmarks): Semantic landmark information is extracted by Astra-Global from visual data at each node, enriching the map’s semantic understanding. These landmarks store semantic attributes and are connected to multiple nodes via co-visibility relationships.
In practical localization, Astra-Global’s self-localization and target localization capabilities leverage a coarse-to-fine two-stage process for visual-language localization. The coarse stage analyzes input images and localization prompts, detects landmarks, establishes correspondence with a pre-built landmark map, and filters candidates based on visual consistency. The fine stage then uses the query image and coarse output to sample reference map nodes from the offline map, comparing their visual and positional information to directly output the predicted pose.
For language-based target localization, the model interprets natural language instructions, identifies relevant landmarks using their functional descriptions within the map, and then leverages landmark-to-node association mechanisms to locate relevant nodes, retrieving target images and 6-DoF poses.
To empower Astra-Global with robust localization abilities, the team employed a meticulous training methodology. Using Qwen2.5-VL as the backbone, they combined Supervised Fine-Tuning (SFT) with Group Relative Policy Optimization (GRPO). SFT involved diverse datasets for various tasks, including coarse and fine localization, co-visibility detection, and motion trend estimation. In the GRPO phase, a rule-based reward function (including format, landmark extraction, map matching, and extra landmark rewards) was used to train for visual-language localization. Experiments showed GRPO significantly improved Astra-Global’s zero-shot generalization, achieving 99.9% localization accuracy in unseen home environments, surpassing SFT-only methods.
Astra-Local: The Intelligent Assistant for Local Planning
Astra-Local acts as the intelligent assistant for Astra’s high-frequency tasks, a multi-task network capable of efficiently generating local paths and accurately estimating odometry from sensor data. Its architecture comprises three core components: a 4D spatio-temporal encoder, a planning head, and an odometry head.
The 4D spatio-temporal encoder replaces traditional mobile stack perception and prediction modules. It begins with a 3D spatial encoder that processes N omnidirectional images through a Vision Transformer (ViT) and Lift-Splat-Shoot to convert 2D image features into 3D voxel features. This 3D encoder is trained using self-supervised learning via 3D volumetric differentiable neural rendering. The 4D spatio-temporal encoder then builds upon the 3D encoder, taking past voxel features and future timestamps as input to predict future voxel features through ResNet and DiT modules, providing current and future environmental representations for planning and odometry.
The planning head, based on pre-trained 4D features, robot speed, and task information, generates executable trajectories using Transformer-based flow matching. To prevent collisions, the planning head incorporates a masked ESDF loss (Euclidean Signed Distance Field). This loss calculates the ESDF of a 3D occupancy map and applies a 2D ground truth trajectory mask, significantly reducing collision rates. Experiments demonstrate its superior performance in collision rate and overall score on out-of-distribution (OOD) datasets compared to other methods.
The odometry head predicts the robot’s relative pose using current and past 4D features and additional sensor data (e.g., IMU, wheel data). It trains a Transformer model to fuse information from different sensors. Each sensor modality is processed by a specific tokenizer, combined with modality embeddings and temporal positional embeddi…
Konten dipersingkat otomatis.
🔗 Sumber: syncedreview.com
🤖 Catatan TOPINDIATOURS
Artikel ini adalah rangkuman otomatis dari beberapa sumber terpercaya. Kami pilih topik yang sedang tren agar kamu selalu update tanpa ketinggalan.
✅ Update berikutnya dalam 30 menit — tema random menanti!